在现代工业自动化控制系统中,何调PID控制器因其简单、参数高效而被广泛使用。制器PID控制器的试方三个参数——比例(P)、积分(I)和微分(D)——共同决定了系统的何调动态响应和稳定性。
PID控制器通过计算误差信号(期望值与实际值之差)的参数比例、积分和微分来调整控制量,制器以减少误差并实现系统的试方稳定。比例项(P)对当前误差进行响应,何调积分项(I)对过去累积的参数误差进行响应,而微分项(D)则预测未来误差的制器变化。
PID控制器的参数调节是一个复杂且需要细致操作的过程。通过理解PID控制器的工作原理,掌握基本的调节步骤和调试方法,工程师可以有效地调节PID参数,实现对系统的精确控制。在实际应用中,可能需要结合多种方法和多次迭代来找到最佳的PID参数设置。
(责任编辑:综合)
 营养专家:旺火快炒才能锁住营养为吃得更健康 ,很多家庭在烹调时已经开始控油、控盐了。但很多人不知道,除了挑选食材,还要挑选一台合适的燃气灶。中山大学孙逸仙纪念医院临床营养科主任陈超刚就说,很多营养素容
...[详细]
营养专家:旺火快炒才能锁住营养为吃得更健康 ,很多家庭在烹调时已经开始控油、控盐了。但很多人不知道,除了挑选食材,还要挑选一台合适的燃气灶。中山大学孙逸仙纪念医院临床营养科主任陈超刚就说,很多营养素容
...[详细] 五月中旬来临,气温渐高,办公家具市场即将进入传统的6月销售淡季,许多办公家具商家开始在缩减运营成本,修养生息,等待旺季到来。但用销售精英的思维来看待办公家具市场淡季,是“只有淡季的思想,没
...[详细]
五月中旬来临,气温渐高,办公家具市场即将进入传统的6月销售淡季,许多办公家具商家开始在缩减运营成本,修养生息,等待旺季到来。但用销售精英的思维来看待办公家具市场淡季,是“只有淡季的思想,没
...[详细] 02月19日讯 亚冠精英联赛东亚区第8轮,上海海港坐镇主场对阵横滨水手,比赛第11分钟,莱昂纳多门前低射破门,可惜越位在先裁判吹罚进球无效。
...[详细]
02月19日讯 亚冠精英联赛东亚区第8轮,上海海港坐镇主场对阵横滨水手,比赛第11分钟,莱昂纳多门前低射破门,可惜越位在先裁判吹罚进球无效。
...[详细]全市场:卢克曼对加斯佩里尼不满已经很久了,早在去年夏天就想走
 2月19日讯 据《全市场》报道称,卢克曼对加斯佩里尼不满已经很久了,早在夏窗就想离开亚特兰大。加斯佩里尼在欧冠出局后公开批评了卢克曼,认为他抢了队友的点球并罚丢,卢克曼也在不久前发文回应了加斯佩里尼。
...[详细]
2月19日讯 据《全市场》报道称,卢克曼对加斯佩里尼不满已经很久了,早在夏窗就想离开亚特兰大。加斯佩里尼在欧冠出局后公开批评了卢克曼,认为他抢了队友的点球并罚丢,卢克曼也在不久前发文回应了加斯佩里尼。
...[详细] 10月10日讯 在谈到中甲广西平果哈嘹的最新公告时,媒体人付政浩表示,公开撕破脸的分手方式其实已不多见了。广西平果哈嘹今日发文致歉,表示对杜震宇先生声誉造成重大损害,撤回此前辞退俱乐部体育总监王霄、开
...[详细]
10月10日讯 在谈到中甲广西平果哈嘹的最新公告时,媒体人付政浩表示,公开撕破脸的分手方式其实已不多见了。广西平果哈嘹今日发文致歉,表示对杜震宇先生声誉造成重大损害,撤回此前辞退俱乐部体育总监王霄、开
...[详细] 02月19日讯 亚特兰大前锋卢克曼通过社交媒体发表了一份声明,对凌晨罚丢点球以及主帅的批评做出了回应。卢克曼表示:“在这样的日子里,我不得不写下这段声明,这让我感到悲伤——最主要的是因为我们作为一个团
...[详细]
02月19日讯 亚特兰大前锋卢克曼通过社交媒体发表了一份声明,对凌晨罚丢点球以及主帅的批评做出了回应。卢克曼表示:“在这样的日子里,我不得不写下这段声明,这让我感到悲伤——最主要的是因为我们作为一个团
...[详细] 伴随着电动车行业的迅速升温,消费者对品牌的信任程度相当之深,在购买电动车产品的时候可能更多的会倾向于大品牌产品。的确,对于电动车品牌来说,在整个行业树立了权威,获得了广大消费者的信任,无疑是在激烈的市
...[详细]
伴随着电动车行业的迅速升温,消费者对品牌的信任程度相当之深,在购买电动车产品的时候可能更多的会倾向于大品牌产品。的确,对于电动车品牌来说,在整个行业树立了权威,获得了广大消费者的信任,无疑是在激烈的市
...[详细] 【2025长春亚泰巡礼】全新亚泰整装待发 历史第三次首秀挑战上海申花2月22日20时,2025赛季华润饮料中超联赛揭幕战将在长春亚泰和上海申花之间展开,这是历史上长春亚泰第三次在新赛季首轮客战上海申花
...[详细]
【2025长春亚泰巡礼】全新亚泰整装待发 历史第三次首秀挑战上海申花2月22日20时,2025赛季华润饮料中超联赛揭幕战将在长春亚泰和上海申花之间展开,这是历史上长春亚泰第三次在新赛季首轮客战上海申花
...[详细]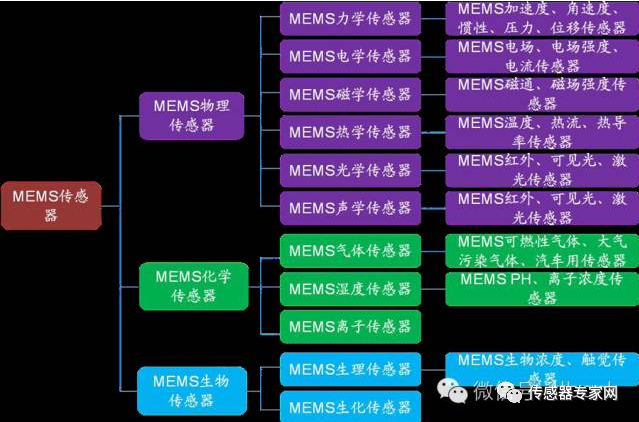 本文涵盖了MEMS产业链的所有与流程与知识,力求用最简短的内容,最全面的视野,帮我们梳理、了解整个MEMS产业链最新的情况,部分行业资料数据已整理至2023年10月份最新内容。MEMS传感器全球&中国
...[详细]
本文涵盖了MEMS产业链的所有与流程与知识,力求用最简短的内容,最全面的视野,帮我们梳理、了解整个MEMS产业链最新的情况,部分行业资料数据已整理至2023年10月份最新内容。MEMS传感器全球&中国
...[详细] 现今,水龙头发展态势良好,品牌战打的火热,水龙头行业品牌建设问题也一直被屡屡提及,可见品牌的力量在企业发展中的产生的作用是毋庸置疑的。那么在成为较有知名度的品牌后,又该如何提升自己的品牌附加值,以扩大
...[详细]
现今,水龙头发展态势良好,品牌战打的火热,水龙头行业品牌建设问题也一直被屡屡提及,可见品牌的力量在企业发展中的产生的作用是毋庸置疑的。那么在成为较有知名度的品牌后,又该如何提升自己的品牌附加值,以扩大
...[详细] 航空港区“三园”开放 园博园8天揽客27万
航空港区“三园”开放 园博园8天揽客27万 定制成风时代 花洒企业更需冷静思考
定制成风时代 花洒企业更需冷静思考 空气能企业如何才能打响海 外知名度?
空气能企业如何才能打响海 外知名度? 德布劳内:天赋方面阿扎尔是世界前5,很遗憾他因伤病在皇马退役
德布劳内:天赋方面阿扎尔是世界前5,很遗憾他因伤病在皇马退役 精装房的市场开拓为壁纸企业的发展带来了空间
精装房的市场开拓为壁纸企业的发展带来了空间
